近日,Web of Science的“基本科学指标数据库(Essential Science Indicators,简称ESI)”2021年1月更新数据显示,我院于曹阳老师以第一作者在《IEEE Transactions on Cybernetics》发表的学术论文“Guidance-error-based robust fuzzy adaptive control for bottom following of a flight-style AUV with saturated actuator dynamics”入选ESI高被引论文。该论文的合作者为华中科技大学向先波教授、张琴副教授以及南安普顿大学Philip A. Wilson教授。该论文主要研究了存在多重系统约束时潜水器高速、精准、稳定航行的问题。
潜水器高航速、高精度路径跟随技术是实现潜水器近底精细目标检测、海底地貌测绘等典型海洋探测与作业任务的技术保障。中高速的跟随需求使得潜水器需装备并依靠单一舵面进行转动和平动两个自由度上操控,形成了一个典型的“少控多”系统。加之,舵机作为整个闭环系统中的执行器,其固有的动力学特性(延滞与饱和等)在现有的潜水器路径跟随技术理论研究工作中常被忽略,导致无法直接将相关理论研究成果移植到实际的潜水器系统中。
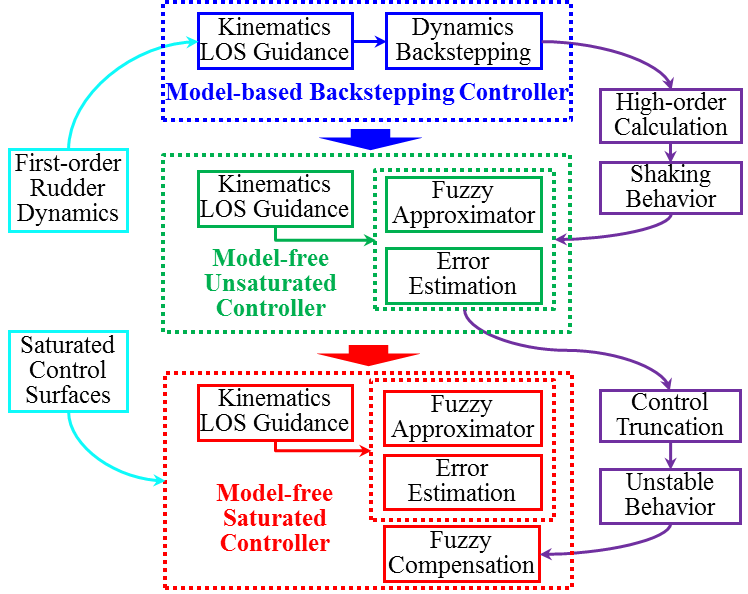
针对该问题,文章引入舵机的时间常数及饱和界限两种约束,构建了完整的潜水器系统动力学模型。基于此模型,设计了时变视线制导律将不受控自由度上的位置误差转化为可控自由度上的角度误差,解决了“少控多”约束问题。然后,利用自适应模糊逼近器在线“对抗”执行器延滞特性与本体非线性耦合形成的高阶未知性,解决了“不确定”约束问题。最后,利用自适应模糊补偿器在线“中和”饱和前后截断误差,解决了“有界性”约束问题。

于曹阳,2013年和2018年分别获得华中科技大学轮机工程学士和博士学位,2017-2018年赴英国南安普顿大学访学(师从Philip A. Wilson教授),2018年底入职上海交通大学海洋学院,依托海洋技术团队(团队负责人:连琏教授),从事潜水器技术与应用、航行器操纵、制导与控制等方面研究工作。目前以第一/通信作者在OE, JOE, APOR, TCYB等国内外重要期刊发表学术论文10余篇。




